Intro a OBIA
Análisis de imágenes

Alta resolución vs Muy alta resolución

- pixel 10 x 10 m
- libre acceso
- mayor res espectral
- mayor res temporal
- mayor extensión
- pixel 0.2 x 0.2m
- (alto) costo
- menor res espectral
- menor re temporal
- menor extension
Alta resolución vs Muy alta resolución
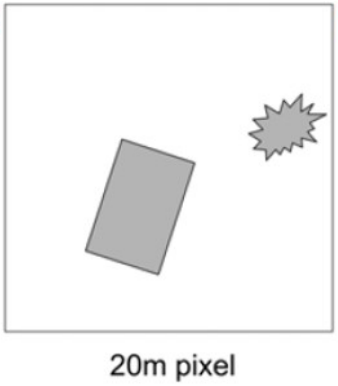
- Varios objetos geográficos en el mismo pixel
- Respuesta espectral mixta, no hay delineación clara de los objetos
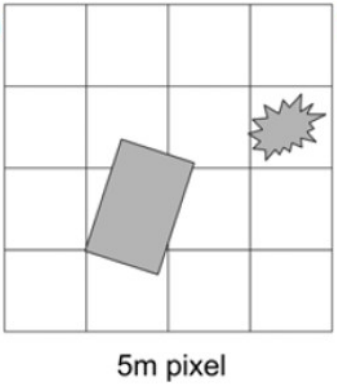
- Algunos píxeles de respuesta espectral mixta y algunos puros
- Resolución espacial ~ tamaño de algunos objetos geográficos
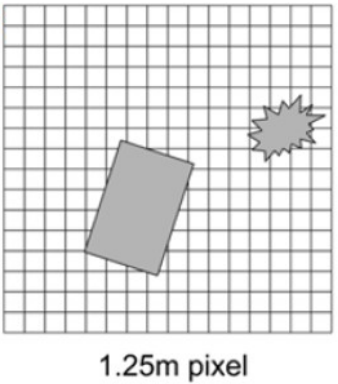
- La mayoría de los píxeles pertenecen a una única clase
- Un solo objeto geográfico contiene varios píxeles
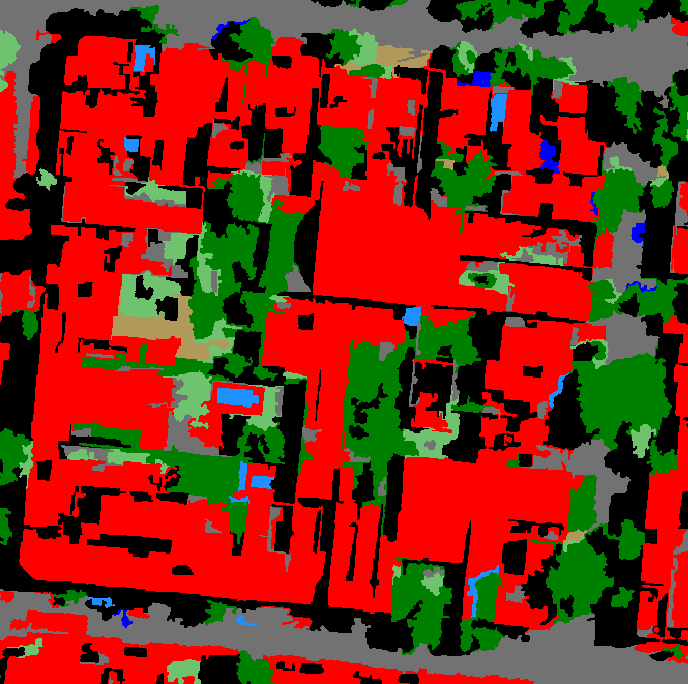
Ejemplo del efecto sal y pimienta

Sobre-segmentación, sub-segmentación y trade-off

Segmentación en GRASS GIS

Diagrama explicativo del algoritmo region growing


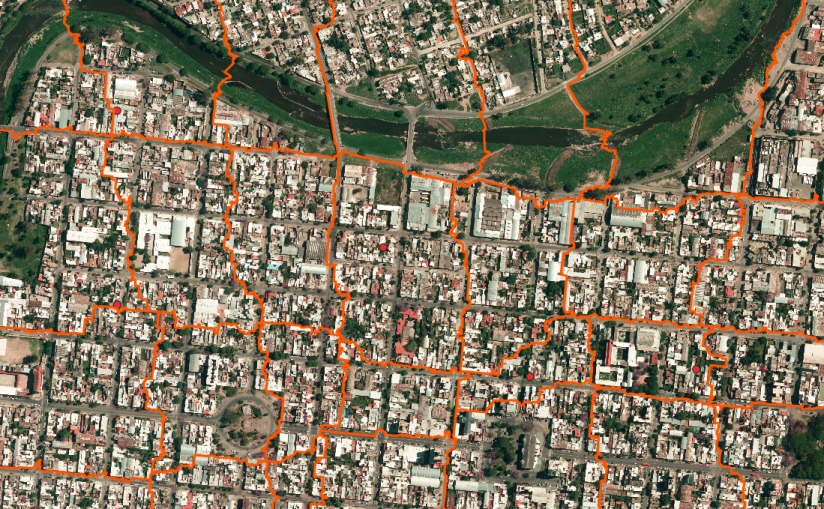
Segmentación en GRASS GIS
- La salida de la segmentación es en formato raster
- El valor de los píxeles corresponde al ID del segmento (único)
- Puede transformarse en vector con el módulo r.to.vect
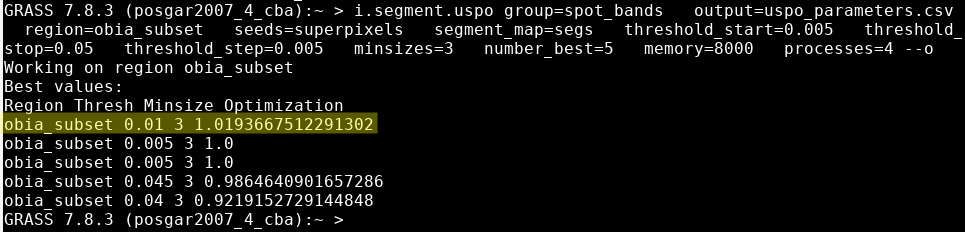
USPO en GRASS GIS
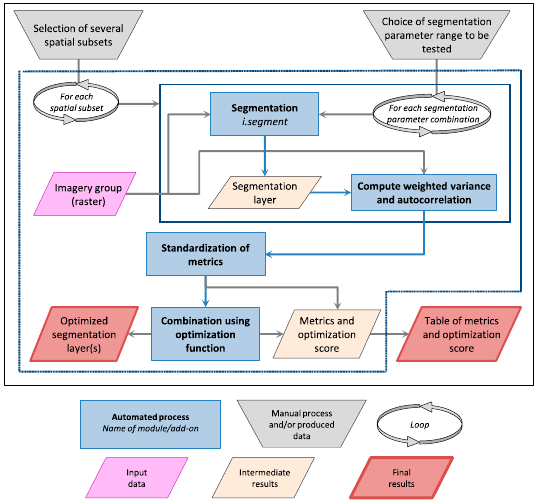
- Primero identificar los valores extremos (sobre y sub-segmentación) >> rango de valores a evaluar
- Con capacidad de hardware limitada, no probar demasiadas combinaciones y trabajar en una región limitada
USPO en GRASS GIS
- Salida de i.segment.uspo: la selección de los mejores valores de los parámetros que se introducirán en i.segment
- Opcionalmente, los primeros X mejores resultados pueden guardarse directamente como capas raster
Para áreas extensas, i.segment.uspo se puede usar para segmentar automáticamente tiles pequeños, cada uno con un parámetro optimizado
Obtención de información derivada
- Índices de vegetación: i.vi o r.mapcalc
- Índices de agua: i.wi o r.mapcalc
- Texturas: r.texture o r.texture.tiled

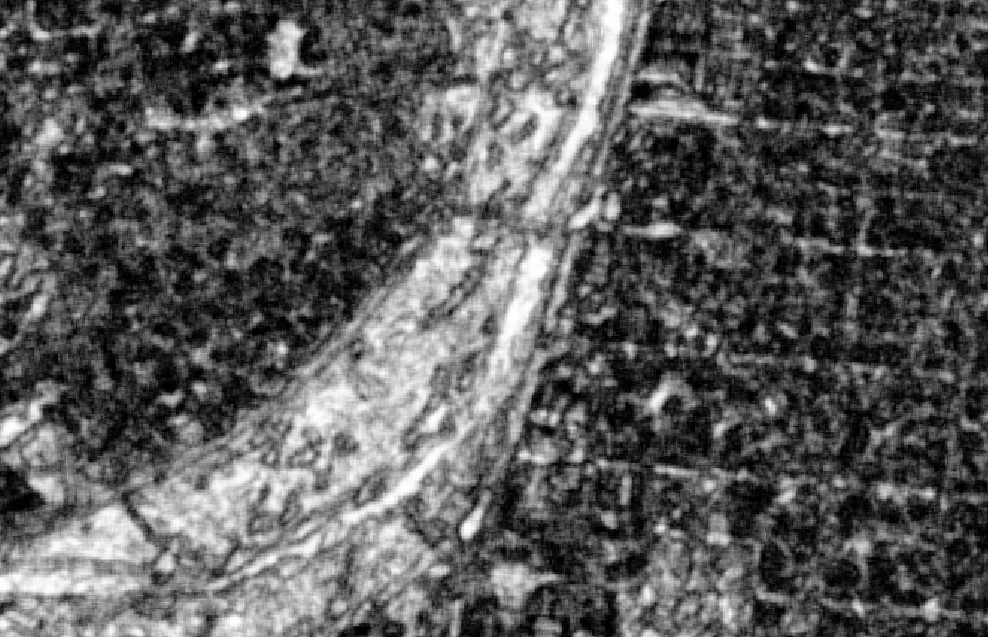
GLCM textures
- Grey-level co-occurrence matrix
- Importante fuente de información
- En el entorno urbano, utilizando imágenes de resolución espacial media, ayuda a identificar las estructuras/funciones urbanas (por ejemplo, los asentamientos informales)

Clasificación basada en reglas en GRASS GIS
- Actualizar una columna en la tabla de atributos de una capa de vectores con v.db.update o db.execute

- Reclasificar un raster resultante de la segmentación con r.mapcalc
OBIA en GRASS GIS
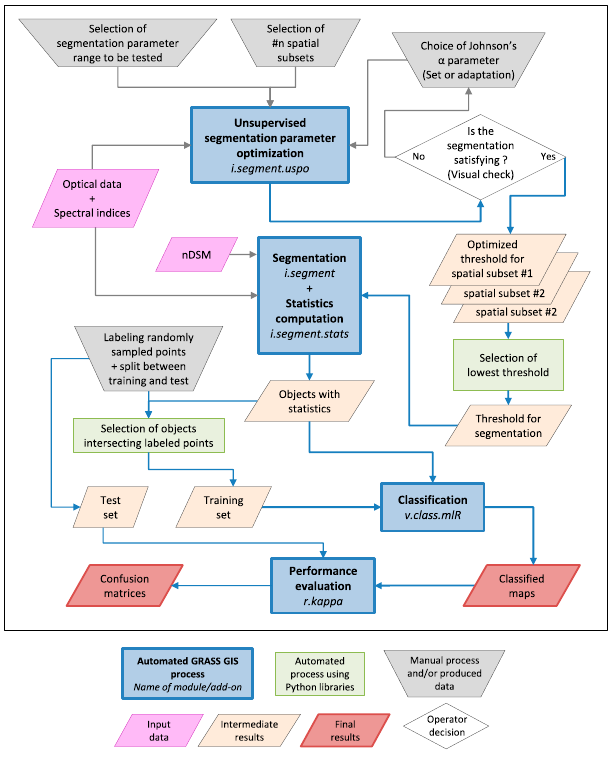
- i.segment para segmentación
- i.segment.uspo para optimización no supervisada de los parámetros de segmentación
- i.segment.stats para computar estadísticas de los segmentos
- i.superpixels.slic para segmentación de superpixeles (SLIC y SLIC0)
- r.to.vect para convertir de raster a vector
- db.execute para ejecutar consultas SQL y actualizar valores en la tabla de atributos de las capas vectoriales (clasificación basada en reglas)
- r.mapcalc para cálculos raster, ej. clasificación basada en reglas
- v.class.mlR para el aprendizaje automático, basado en caret de R
- i.cutlines para la partición automatizada (tiling) de una gran escena por líneas naturales
